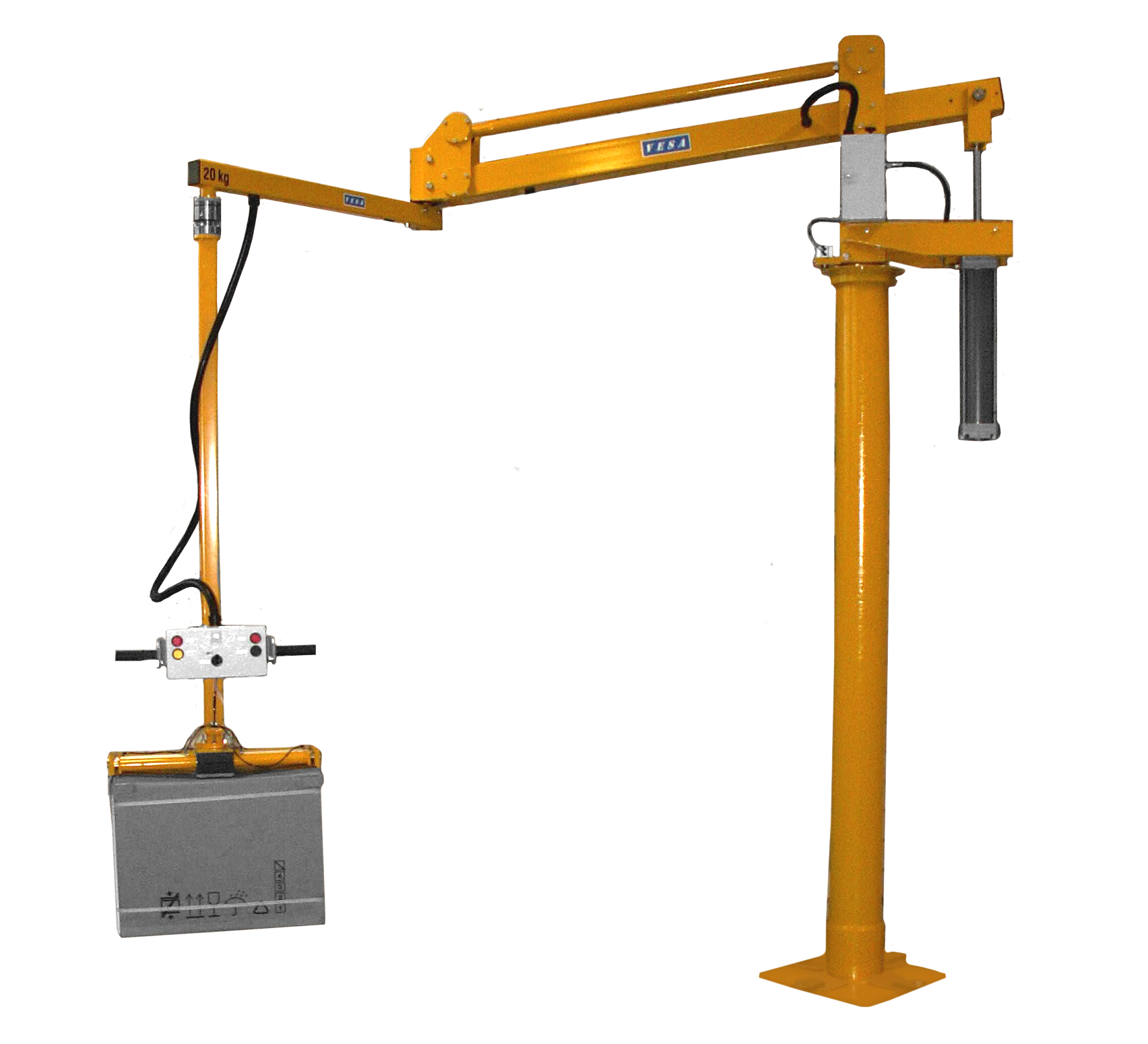
Durch die integrierte automatische Wägesteuerung wird jede Last bis zu etwa 250 kg in einen Schwebezustand versetzt, so daß der Bediener den Manipulator durch leichtes Ziehen oder Drücken am Führungsgriff, stufenlos auf und ab bewegen kann.
Die starre Lastführung ermöglicht zudem einen pendelfreien Transport des Greifgutes und die Aufnahme von exzentrischen Lasten. Je nach Anwendungsfall wird der Manipulator als Säulen - oder Deckengerät ausgeführt.
Da die Manipulatoren aus einem Baukastensystem entspringen, können neben der Standardausführung längere oder kürzere Säulen, diverse Steuerungsvarianten sowie verschiedene Auslegerarmlängen bis zu 4 m gewählt werden. Die Lastaufnahmemittel werden immer kundenspezifisch gefertigt.
Anwendungsbeispiele

















⏏︎Video
Manipulator | Aussengreifer
Manipulator | Aussengreifer 02
Manipulator | Aussengreifer 03
Manipulator | Greiftraverse
Manipulator | Kartongreifer
Manipulator | Kastengreifer
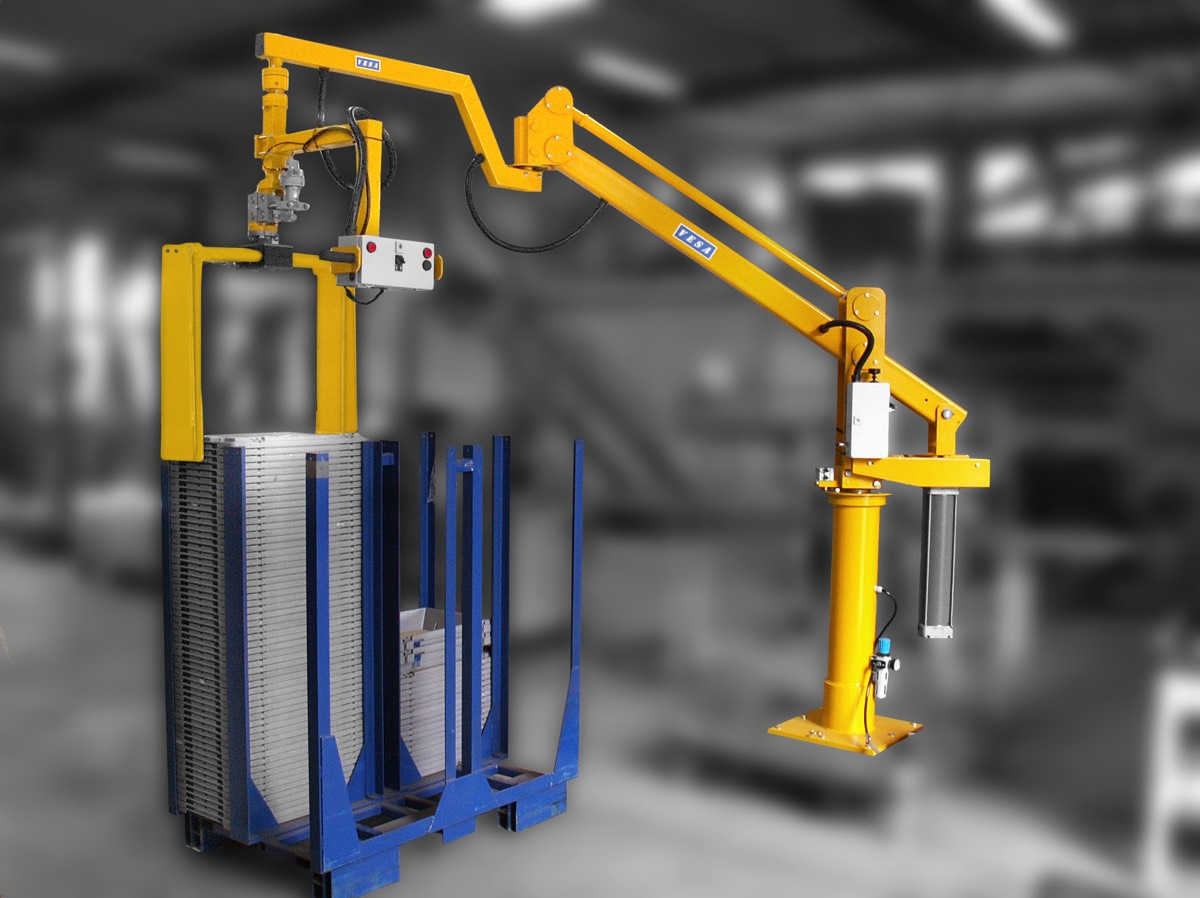
Manipulator | Palettengreifer
Manipulator | Rollengreifer
Manipulator | Vakuumgreifer
Manipulator | Lichtkuppelwender
Manipulator | Palettengreifer 02
Manipulator | Parallelgreifer

Knickgelenkausleger PSL
Unsere druckluftbetriebenen Knickgelenkausleger werden mittels pneumatischen Seilbalancern oder Hubzylindern ausgestattet …
Traglast bis 160 kg
Ausladung bis 4.000 mm

Knickgelenkausleger ESL
Unsere elektrisch betriebenen Knickgelenkausleger werden mittels Elektrohubantrieb ausgestattet …
Traglast bis 160 kg
Ausladung bis 4.000 mm

Teleskop - Hubachse PFM
Unsere elektrisch / pneumatisch betriebenen Hubachsen kommen in Deckenschienensystemen zum Einsatz …
Traglast bis 500 kg
Lastmomente bis 2.500 Nm

Teleskop - Hubachse Handy
Unsere zum lastzentrischen Transport verwendeten Hubachsen kommen in Deckenschienensystemen zum Einsatz …
Traglast bis 100 kg
Lastmomente bis 100 Nm

Mobillift ML
Unsere bodengeführten Hebehilfen können große Flächen abgrenzen …
Traglast bis 200 kg
Hubhöhe bis 2.500 mm

Hubmast
Unsere elektrisch betriebenen Hubmaste kommen in Deckenschienensystemen zum Einsatz …
Traglast bis 500 kg
Lastmomente bis 2.500 Nm
Manipulatoren für sicheres, schwereloses Arbeiten
Die von der VESA GmbH angebotenen Manipulatoren sind bedienergeführte Handlingsysteme. In vielen Unternehmen der Industrie ist das sichere Heben und Bewegen von schweren Werkstücken eine körperlich belastende Herausforderung für die Menschen. Ein Manipulator bietet hier die Lösung, um Aufgaben im Handling effizienter und schonender zu gestalten. Doch was verbirgt sich genau hinter diesen Geräten?
Hier erfahren Kunden alles Wissenswerte über den Aufbau, die Funktion und die vielfältigen Vorteile dieser Produkte.
Aufgabe und Funktion des Manipulators
Die wesentliche Aufgabe und Funktion eines Manipulators ist – allgemein gesagt – das präzise Bewegen von Objekten im Raum. Da jeder Produktionsschritt ganz eigene Herausforderungen mit sich bringt, gibt es hierfür keine Standardlösung. Vielmehr setzen wir auf verschiedene Konstruktionsweisen, die wir genau an die individuellen Anforderungen unserer Kunden anpassen. So bauen wir etwa viele Geräte speziell als Knickarm-Manipulatoren mit mehreren Gelenkarmen auf, damit der Werker über verschiedene Achsen jeden Punkt im Schwenkbereich flexibel erreichen kann. Die verfügbare Armlänge liegt bei bis zu vier Metern.
Unabhängig von der spezifischen Architektur überzeugen alle Varianten durch eine äußerst leichte und intuitive Handhabung, was ihren hochwertigen Lagerungen und intelligenten Steuerungssystemen zu verdanken ist. Eine integrierte Wägesteuerung versetzt jede Last – ob leichte Bauteile oder schwere Gewichte bis zu 250 Kilogramm – in einen nahezu schwerelosen Schwebezustand.

Jetzt Kontakt aufnehmen
Unser Service-Team steht Ihnen jederzeit zur Verfügung. Schreiben Sie uns – wir kümmern uns um Ihr Anliegen.
Wie bedient man einen Industriemanipulator?
Der Werker führt den Manipulator direkt mit der Hand. Er kann ihn durch leichtes Ziehen oder Drücken am Führungsgriff stufenlos auf und ab bewegen. Ein seitliches Verschieben oder Positionieren der Teile ist punktgenau möglich. Um verschiedenartige Werkstücke aufzunehmen, gibt es diverse Lastaufnahmemittel; ein Vakuumheber saugt beispielsweise glatte Formen wie Glasscheiben sicher an. Das Prinzip ist so einfach wie effektiv:
Der individuelle Greifer am Manipulator hält das Gewicht, während der Bediener sich auf das exakte Positionieren am gewünschten Ort konzentriert. Auch und gerade in Produktionsstätten mit internationaler Belegschaft, in denen verschiedene Sprachen gesprochen werden, ist diese intuitive Handhabung ein enormer Pluspunkt.
Vorteile für Menschen, Produktivität und Qualität
Die deutlichsten Vorteile, die Manipulatoren bieten, sind:
- Sicherheit im Arbeitsumfeld: Das Risiko von Verletzungen sinkt, da Mitarbeiter keine schweren Lasten mit eigener Körperkraft heben müssen.
- Ergonomie: Die physische Belastung sinkt, was die Mitarbeiter körperlich schont, ihre Gesundheit erhält und Fehlzeiten verringert.
- Effizienz: Die ergonomische Arbeitsumgebung steigert die Produktivität und trägt zur Optimierung der Arbeitsabläufe bei.
- Höchste Produktqualität: Das unterstützte Handling verbessert die Qualität der Prozesse in der Fertigung und senkt den Personalaufwand: Häufig reicht an einem Arbeitsplatz ein durch den Manipulator unterstützter Werker aus, wo vorher zwei Arbeitskräfte beschäftigt werden mussten.
Dabei ermöglicht die starre Lastführung einen stets pendelfreien Transport des Greifgutes sowie die sichere Aufnahme von exzentrischen Lasten.
Jetzt Kontakt aufnehmen
Unser Service-Team steht Ihnen jederzeit zur Verfügung. Schreiben Sie uns – wir kümmern uns um Ihr Anliegen.
Flexibilität und Einsatzbereiche innerhalb von Unternehmen
Dank eines intelligenten Baukastensystems bietet die VESA GmbH mit ihren Produkten höchste Flexibilität in allen Bereichen. Je nach Anwendungsfall führen wir unsere Manipulatoren als Säulen- oder Deckengeräte aus. Für unterschiedliche Anwendungen gibt es verschiedene Greifsysteme mit unterschiedlichen Bezeichnungen, etwa Palettengreifer, Rollengreifer und Vakuumgreifer.
Die Lastaufnahmemittel fertigen wir stets kundenspezifisch. Unser Vertrieb berät hierzu gern. Die Tragkraft unserer Produkte ist für verschiedenste Bauteile ausgelegt, weitgehend unabhängig von der Größe der Werkstücke. Egal, ob Metall, Kunststoff oder Holz – unsere Manipulatoren integrieren sich problemlos in jeden Produktionsschritt.
Roboter vs. Manipulatoren – ein Vergleich
Oftmals werden vollautomatische Roboter und Manipulatoren verwechselt, obwohl sie grundsätzlich verschieden konzipiert sind. Ein automatischer Industrieroboter führt stur programmierte Bewegungen aus und eignet sich primär für die vollautomatisierte Massenfertigung. Mit einem solchen Roboter lassen sich Werkstücke vollkommen autark in verschiedenen Positionen und Orientierungen im Raum positionieren. Dazu gehören unter anderem die Verdrehung um einzelne Achsen oder das komplexe Drehen von Objekten.
Im Gegensatz zu diesen vollautomatisierten Maschinen stehen Manipulatoren, die definitionsgemäß manuell geführte Systeme sind. Sie agieren nicht als eigenständige Automaten, sondern dienen als direkte mechanische Unterstützung für den Menschen. Während der Roboter ein festes Programm abarbeitet, punktet der Manipulator durch seine Anpassungsfähigkeit an wechselnde Arbeitsanforderungen und die Integration des Werkers in den Arbeitsprozess.
Da der Mensch die Entscheidungen trifft und den Manipulator führt, entfällt die starre Bindung an eine reine Automation. So stellt der Manipulator die ideale Hebehilfe dar, um Flexibilität, menschliches Urteilsvermögen und sicheres, ergonomisches Arbeiten perfekt miteinander zu vereinen.

Jetzt Kontakt aufnehmen
Unser Service-Team steht Ihnen jederzeit zur Verfügung. Schreiben Sie uns – wir kümmern uns um Ihr Anliegen.
Häufig gestellte Fragen (FAQ)
Was ist ein Manipulator in der Industrie?
Ein Manipulator ist eine Hebehilfe, die in vielen Bereichen der Industrie Verwendung findet, um schwere Objekte, Werkstücke oder Produkte mühelos und präzise zu bewegen. Im Gegensatz zu einem automatisierten Roboter wird er manuell vom Bediener geführt.
Welche Lasten kann ein Manipulator heben?
Ein Manipulator von VESA kann Bauteile und Lasten bis zu 250 Kilogramm sicher heben und mit seinem Arm punktgenau in die richtige Position bringen.
Welche Arten von Lastaufnahmemitteln gibt es?
Je nach Formen und Materialien der Werkstücke kommen unterschiedliche Vorrichtungen zum Einsatz. Dazu zählen mechanische Greifer ebenso wie Vakuumheber, um jedes Werkstück – von Holz über Kunststoff und Glas bis zu Metall – sicher zu fassen und zu bewegen.
Warum ist ein Manipulator besser als einfache Maschinen, zum Beispiel Krane?
Ein Manipulator mit Gelenkarmen ermöglicht eine starre Lastführung. Das bedeutet, dass der Werker Objekte pendelfrei bewegen, greifen und am gewünschten Punkt platzieren kann. Aufgrund der intelligenten Balanciersteuerung wird die Last für den Werker „schwerelos“. Einfache Krane bieten eine derart hohe Flexibilität bei zugleich intuitiver Bedienung nicht.
Kann der Manipulator an unsere Arbeitsumgebung angepasst werden?
Ja, mit Sicherheit! Wir passen unsere Produkte individuell an die Vorstellungen des Kunden an. Ob Deckenmontage, spezielle Achsen oder maßgeschneiderte Greifer für spezielle Prozesse – wir suchen und finden die optimale Lösung für jedes Unternehmen.
© VESA GmbH 2019 | Datenschutz | Impressum